
This article is a guide about the popular Ultrasonic Sensor HC – SR04. We’ll explain how it works, show you some of its features and share an Arduino project example you can follow to integrate in your projects. We provide a schematic diagram on how to wire the ultrasonic sensor, and an example sketch to use with the Arduino.

Description
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. It comes complete with ultrasonic transmitter and receiver modules.
Features
Here’s a list of some of the HC-SR04 ultrasonic sensor features and specs:
- Power Supply :+5V DC
- Quiescent Current : <2mA
- Working Current: 15mA
- Effectual Angle: <15°
- Ranging Distance : 2cm – 400 cm/1″ – 13ft
- Resolution : 0.3 cm
- Measuring Angle: 30 degree
- Trigger Input Pulse width: 10uS
- Dimension: 45mm x 20mm x 15mm
How Does it Work?
The ultrasonic sensor uses sonar to determine the distance to an object. Here’s what happens:
- The transmitter (trig pin) sends a signal: a high-frequency sound.
- When the signal finds an object, it is reflected and…
- … the transmitter (echo pin) receives it.
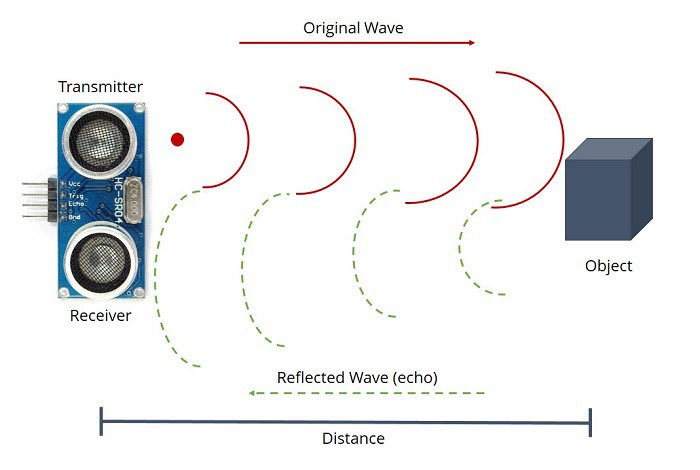
The time between the transmission and reception of the signal allows us to calculate the distance to an object. This is possible because we know the sound’s velocity in the air.
HC-SR04 Ultrasonic Sensor Pinout

Pins
- VCC: +5VDC
- Trig : Trigger (INPUT)
- Echo: Echo (OUTPUT)
- GND: GND
Where to buy?
You can check the Ultrasonic Sensor HC-SR04 sensor on Maker Advisor to find the best price.

Arduino with HC – SR04 Sensor
This sensor is very popular among the Arduino tinkerers. So, here we provide an example on how to use the HC-SR04 ultrasonic sensor with the Arduino. In this project the ultrasonic sensor reads and writes the distance to an object in the serial monitor.
The goal of this project is to help you understand how this sensor works. Then, you should be able to use this example in your own projects.
Note: There’s an Arduino library called NewPing that can make your life easier when using this sensor.
Parts Required
Here’s a list of the parts required to follow the next tutorial:
- Arduino UNO – read Best Arduino Starter Kits
- Ultrasonic Sensor (HC-SR04)
- Breadboard
- Jumper wires
Schematics
Follow the next schematic diagram to wire the HC-SR04 ultrasonic sensor to the Arduino.

The following table shows the connections you need to make:
| Ultrasonic Sensor HC-SR04 | Arduino |
| VCC | 5V |
| Trig | Pin 11 |
| Echo | Pin 12 |
| GND | GND |
Code
Upload the following code to your Arduino IDE.
/*
*
*
* Complete Guide for Ultrasonic Sensor HC-SR04
*
Ultrasonic sensor Pins:
VCC: +5VDC
Trig : Trigger (INPUT) - Pin11
Echo: Echo (OUTPUT) - Pin 12
GND: GND
*/
int trigPin = 11; // Trigger
int echoPin = 12; // Echo
long duration, cm, inches;
void setup() {
//Serial Port begin
Serial.begin (9600);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// Convert the time into a distance
cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343
inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(250);
}
How the Code Works
First, you create variables for the trigger and echo pin called trigPin and echoPin, respectively. The trigger pin is connected to digital Pin 11, and the echo pins is connected to digital Pin 12:
int trigPin = 11;
int echoPin = 12;
You also create three variables of type long: duration, cmand inch. The duration variable saves the time between the emission and reception of the signal. The cm variable will save the distance in centimeters, and the inch variable will save the distance in inches.
long duration, cm, inches;
In the setup(), initialize the serial port at a baud rate of 9600, and set the trigger pin as an output and the echo pin as an input.
//Serial Port begin
Serial.begin (9600);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
In the loop(), trigger the sensor by sending a HIGH pulse of 10 microseconds. But, before that, give a short LOW pulse to ensure you’ll get a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
Then, you can read the signal from the sensor – a HIGH pulse whose duration is the time in microseconds from the sending of the signal to the reception of its echo to an object.
duration = pulseIn(echoPin, HIGH);
Finally, you just need to convert the duration to a distance. We can calculate the distance by using the following formula:
distance = (traveltime/2) x speed of sound The speed of sound is: 343m/s = 0.0343 cm/uS = 1/29.1 cm/uS Or in inches: 13503.9in/s = 0.0135in/uS = 1/74in/uS
We need to divide the traveltime by 2 because we have to take into account that the wave was sent, hit the object, and then returned back to the sensor.
cm = (duration/2) / 29.1;
inches = (duration/2) / 74;
Finally, we print the results in the Serial Monitor:
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
Source code with NewPing
You can also use the the NewPing library. Download the library here.
After installing the NewPin library, you can upload the code provided below.
/*
*
* created by http://playground.arduino.cc/Code/NewPing
*/
#include <NewPing.h>
#define TRIGGER_PIN 11
#define ECHO_PIN 12
#define MAX_DISTANCE 200
// NewPing setup of pins and maximum distance
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
}
void loop() {
delay(50);
unsigned int distance = sonar.ping_cm();
Serial.print(distance);
Serial.println("cm");
}
How the Code Works
Getting the distance to an object using the NewPing library is much simpler.
You start by including the NewPing library:
#include <NewPing.h>
Then, define the trigger and echo pin. The trigger pin is connected to the Arduino digital Pin 11, and the echo to Pin 12. You also need to define the MAX_DISTANCE variable to be able to use the library.
#define TRIGGER_PIN 11
#define ECHO_PIN 12
#define MAX_DISTANCE 200
Then, you create a NewPing instance called sonar:
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
In the setup(), you initialize the Serial communication at a baud rate of 9600.
Serial.begin(9600);
Finally, in the loop(), to get the distance you just need to use the ping_cm() method on the sonar object. This will give you the distance in centimeters.
unsigned int distance = sonar.ping_cm();
If you want to get the distance in inches you can use sonar.ping_in() instead.
Troubleshooting
NOTE: “If the HC-SR04 does not receive an echo then the output never goes low. Devantec and Parallax sensors time out after 36ms and I think 28ms respectively. If you use Pulsin as above then with no return echo the program will hang for 1 second which is the default timeout for Pulsin. You need to use the timeout parameter.
http://arduino.cc/en/Reference/PulseIn
The HC-SR04 barely works to 10 feet giving a total path length of 20 feet and a path time of about 20ms so set the timeout to something above that, say 25 or 30ms.
If you put a resistor, say 2k2 between E and T then only connect to T you can use the HC-SR04 from just one Arduino pin. Look up single pin operation of ultrasonic sensors.
Also if you are using a HC-SR04 with a PicAxe you need to up the clockspeed to at least 8MHz otherwise they don’t see the start of the echo pulse so pulsin never starts. The HC-SR04 works fine with a BS2.” by David Buckley
Thanks to my friend David to leave such an helpful comment!
Wrapping Up
In this post we’ve shown you how the HC-SR04 ultrasonic sensor works, and how you can use it with Arduino. For a project example, you can build a Parking Sensor with LEDs and buzzer.
If you like Arduino, you may also like:
- Guide to SD card module with Arduino
- Guide to DHT11/DHT22 Humidity and Temperature Sensor With Arduino
- Guide for TCS230/TCS3200 Color Sensor with Arduino
.
We hope you found this tutorial useful. Thanks for reading.

4 thoughts on “Complete Guide for Ultrasonic Sensor HC-SR04 with Arduino”